Browse · MathNet
PrintSelection and Training Session
Belarus geometry
Problem
A point lies inside an isosceles right triangle with . Prove the inequality and find all points for which the equality holds.
Solution
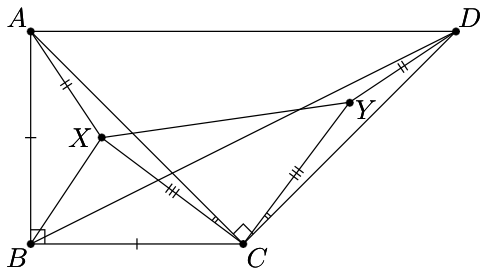
First solution. Consider the rotation around point by such that the images of point and point lie in the same half-plane with respect to the line (see the Fig.). Denote the images of points and by and respectively. By construction, the triangles and are isosceles right triangles with right angles at vertex , hence and . From the right triangle one can easily find . Finally, , since is the image of under rotation.
The required inequality is equivalent to which is true, as the length of the polyline is greater or equal to the length of the segment . The equality holds if and only if points and lie on the segment . It is easy to see that there is only one such point. Indeed, let be the foot of the perpendicular from point to the line . Point is the midpoint of the hypotenuse of an isosceles right triangle , therefore the triangle is an isosceles right triangle with a right angle at vertex . Thus, there is exactly one such point , namely, the image of point (lying inside the triangle ) under the rotation by with respect to the point .
---
Alternative solution.
Consider points , , and on the Cartesian plane. Then the required inequality is equivalent to: Note that this equality is equivalent to since . Now the equality (2) follows from for vectors , , , and . For any point the equality in (2) means that vectors , and are collinear. Hence and , which leads to and . Adding this equations we get and after the substitution find , . It is easy to check that point satisfy the conditions of the problem.
The required inequality is equivalent to which is true, as the length of the polyline is greater or equal to the length of the segment . The equality holds if and only if points and lie on the segment . It is easy to see that there is only one such point. Indeed, let be the foot of the perpendicular from point to the line . Point is the midpoint of the hypotenuse of an isosceles right triangle , therefore the triangle is an isosceles right triangle with a right angle at vertex . Thus, there is exactly one such point , namely, the image of point (lying inside the triangle ) under the rotation by with respect to the point .
---
Alternative solution.
Consider points , , and on the Cartesian plane. Then the required inequality is equivalent to: Note that this equality is equivalent to since . Now the equality (2) follows from for vectors , , , and . For any point the equality in (2) means that vectors , and are collinear. Hence and , which leads to and . Adding this equations we get and after the substitution find , . It is easy to check that point satisfy the conditions of the problem.
Final answer
Inequality: AX + BX + sqrt(2)·CX ≥ sqrt(5)·AB. Equality holds for exactly one interior point X. In a coordinate model with A at (0,1), B at (0,0), and C at (1,0), this point is X = (2/5, 1/5). Geometrically, it is the image of C under a ninety-degree rotation about H, where H is the foot of the perpendicular from C to BD and D is the image of A under a ninety-degree rotation about C.
Techniques
RotationCartesian coordinatesVectorsTriangle inequalitiesOptimization in geometry